| | 
|
Notificaciones
Limpiar todo
Documentación sobre el código de k3ng tienes aquí https://docs.google.com/document/d/1Q4_X2XdndylohjhZWsaAUNl1UIqYGt9Kxp1VM70XJGM/edit?usp=sharing pero no está muy completa. También tienes aquí https://github.com/k3ng/k3ng_rotator_controller/wiki
Y sobre arduino en si hay muchiiiiisima
Me alegro que vayas avanzando. Respecto al reinicio hay otra forma pero implica cortar una pista y para poder programar el arduino tendrás que volver a unirla o reiniciarlo tu a mano
Enviado desde mi SM-N9005
Ángel
Buenas tardes
he probado con un potenciometro aplicandole los 5V y estando en 0V me marca el azimut de 5º y estando a 5V marca 354º la alimentacion la he cojido del arduino hay que calibrar algo en el codigo?
Gracias
EB5DXJ,Jose
Hola, hay que calibrar el sistema, conectate a él con el terminal que trae la aplicacion de arduino y giras el rotor de forma manual a 0º y le envias O (letra O) y enter asi se calibra el "cero" luego giras a 360º de forma manual y le envias F y enter y calibras los 360º.
Con eso almacenas en la EPROM del micro la info.
73.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Hola Pedro
muchas gracias por la ayuda ya esta calibrado,una ultima cosa no consigo que conecte con el HRD he seguido las instrucciones que hay pero no llega a conectar con el pstrotator sin problemas
SALUDOS
EB5DXJ,Jose

Hola,
Estoy estos días trabajando en mi control de rotores con Arduino y quiero probar el sistema PWM con motores de continua.
He pedido una placa de esas baratas en E-Bay con un par de BTS7960B, concretamente ésta;
[img]  [/img]
[/img]
Era por preguntar si alguien tiene experiencia con ellas.
A todo esto, necesito hacer un divisor de tensión pero al ir el motor alimentado con una sistema en Puente-H con dos BTS7960B, no tengo claro como hacerlo.
Es que el motor es de 3v (si, 3v, es un prototipo pequeño, no el de la antena), y esos BTS7960B necesitan mínimo 6v.

No se si al ser PWM podré regular para que no pase de 3v, o si por el contrario es mejor hacer un divisor supongo que simétrico, con tres resistencias;
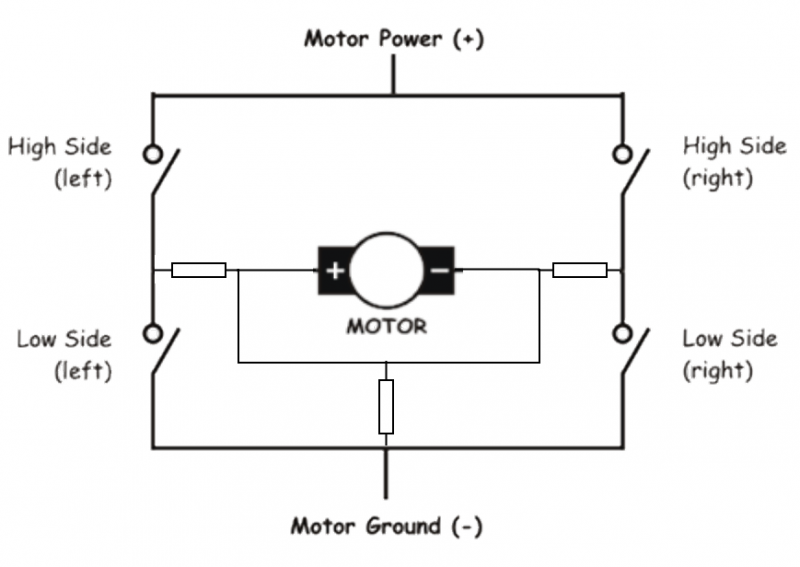
¿Está correcto?
Gracias
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Para las pruebas lo alimentaría con la tensión definitiva, con una resistencia en serie con el motor que se coma la diferencia, Ohm te dirá como calcular el valor y la disipación de esa resistencia (que puede ser una lampara).
Si quieres buenas respuestas haz buenas preguntas
73 de Angel, EA2ET.
Claro haz como dice Angel, pones una resistencia en serie con el motor, realmente ese es el divisor de tension, en lugar de usar dos resistencias (que es como acostumbramos a ver) una de las dos resistencias es el motor.
Debes conoce datos como la tension nominal del motor (en el dibujo V motor) y la corriente que consume (en el dibujo I motor).
73.

Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Hola,
Pedro, perdona, se me pasó agradecerte la explicación.
Miraré lo de la resistencia. No debería ser problemático. es solo para hacer unas pruebas.
Y hablando de pruebas...
En ese montaje prototipo le puse un potenciómetro como sensor de dirección pero continuando con mis habituales ganas de mirar nuevas cosas... quiero probar esos sensores digitales que hay disponibles.
El código de K3NG está ya preparado para algunos de ellos;
[ul]
[li]HMC5883L digital compass[/li]
[li]ADXL345 accelerometer[/li]
[li]LSM303 digital compass and accelerometer[/li]
[li]HH-12 / AS5045[/li]
[/ul]
El último lo descarto pues necesita un eje con un pequeño imán (para eso sigo con el potenciómetro).
Y aquí vienen mis dudas. A ver si alguien controla del tema.
Hay un chip que es una "brújula digital" que es el HMC5883L. Lo he visto en YouTube y parece funcionar bien.
Pero por alguna razón que desconozco, ahora hay otros chips que además de la brújula le añaden un acelerómetro, por ejemplo el chip LSM303.
Y dicen que el acelerómetro es para compensar la brújula.
No se si estoy en lo cierto, pero eso puede ser para aplicaciones tipo robótica, drones, etc. donde necesiten tener en cuenta más movimientos.
Yo me pregunto si para mover una antena en azimuth ¿Sería suficiente el chip "solo-brújula"?
Lo que ya no lo tengo claro sería para azimuth y elevación. Ahí creo que ya sería necesario el chip combinado.
¿Alguien sabe de esto?
Gracias
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Hola,
Pues os comento que pedí un LSM303 y ya me llegó.
Lo conecté ayer y...
Muy bien, la verdad que con estos dispositivos se te sacan las ganas de potenciómetros, encoders, y ese tipo de sensores.
Esto es una plaquita muy pequeña, le das alimentación y con sólo dos hilos más (es I2C) pues ya funciona.
Lo sujetas al mástil y listo.
En HF, donde la alta precisión no es muy necesaria, es ideal.
pero incluso en VUHF e incluso con elevación, pienso que también se pueden usar.
No se si actualmente son aptos para seguir satélites o la Luna, pero yo creo que si, por lo menos para VHF.
Intenté hacer un vídeo pero sólo tengo el móvil y no sale muy bien.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Hola Maximo, pues siempre he tenido ganas de usar uno de estos pero me ha hechadopara atras el pensar que los posibles elementos de hierro cercanos falseen la medida, pero no se si esto se puede compensar y calibrar, imagino que si. Tambien imagino que sabes que este dispositivo mide el norte magnetico, no el geografico, por lo que hay que sumar o restar grados para compensarlo, aunque es facil en el codigo.
73 y ya nos contaras.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Buenas a todos...
Recientemente he cambiar el rotor por un G1000DXC.... tengo un problema y es que cuando está la antena orientada al sur la RF hace que la posición del rotor varie en el mando.
No me importa mucho en un uso normal pero haciendo seguimiento de satélites esto hace que al hacer PTT el arduino mueva la antena para orientarla y al soltar vuelve a moverla donde debería estar realmente...
Alguien ha tenido un problema parecido?? Un kilo de ferritas podría ayudar?
Un saludo,
Ángel
Humm, no se como tendras el montaje hecho, pero en teoria si pones en serie justo antes del pin de entrada analogica del arduino una resistencia de 1K (mas o menos) intercalada en el cable que muestrea la tension del pote del rotor y un condensador de 1nF a masa debe filtrarte la RF, me parece que en los esquemas de K3NG esta asi.
Yo estoy terminando otro mando, he metido todo en una caja de rack de 19", con todo quiero decir tres arduinos UNO, tres placas de 4 reles, tres LCD, y un HUB USB, la idea es tener control de tres rotores en azimut y elevacion en una caja, con un solo cable USB.
Le he puesto un interrruptor general y tres para habilitar cada uno de las placas de rele, de modo que si algun rotor tiene un problema se pueda deshabilitar dejando los otros en marcha.
Ahora estoy con el trafo que me parece que da tension de mas, asi que tendre que modificarlo o buscar otro, la idea es que dentro de la caja haya varias tensiones de CA y CC, para que sea adaptable.
Ya pondre fotos.
73.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Hola,
Escribió:cuando está la antena orientada al sur la RF hace que la posición del rotor varie en el mando
Ángel, ¿Que sensor estás usando?
Pregunto por si es magnético o potenciómetro.
Yo no se decirte la solución exacta, solo mirar el cableado y situación de las cosas, poner todo a masa bien.
Y luego lo que te dice Pedro, primero unas ferritas enrrollando los cables, y si no, pues eso con un condensador, o con chokes de RF (de esos pequeños de 470uH).
Hay que ir probando a ver cual va a mejor a cada caso.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
El problema es con el propio mando del rotor, un G1000DXC....
No es en si con el arduino, claro que el arduino ve el mismo "error" que ve el mando.... El G1000DXC tiene un DIN en el que da la salida entre 0 y 5V de la posición del rotor.
Gracias a ambos....
Ángel
Hola a todos, leo con interés todos los posts que ponéis sobre el tema del arduino y K3NG. Ha llegado a mis manos un rotor con la caja del controlador mediante el arduino y lo quiero utilizar en mi nuevo sistema de elevación, pero por más que busco que tipo de conexiones debo hacer en un Yaesu G550 no encuentro nada. No he visto nada en los posts anteriore, quedaría agradecido si alguien me pudiera orientar.
Y otra pregunta como puedo controlar el azimut con el N1MM, los parámetros está correctos pero no hace nada el rotor ni el arduino.
Un saludo
73
Aclarar que el rotor de azimut es un G1000 y el de elevación el G550, para que funcionen con la misma placa.
Hola EA5DF,
Al Arduino tienes que ponerle unos relés a las salidas, para manejar el rotor.
Las salidas, los pines usados, los fijas tu en la configuración del Arduino. El Software de K3NG tiene un apartado para fijar qué pines quieres usar para cada cosa.
Una vez fijas los pines, y conectas los relés, luego solo es puentear los relés del Arduino con los del rotor.
Para las lecturas, tienes que inyectar la lectura del potenciómetro del rotor al Arduino. Los pines también se configuran. Pero hay que tener cuidado con las tensiones, el Arduino sólo acepta 5vcc máximo y los rotores... hay de todo.
Lo cierto es que no es "enchufar y listo", es algo que cada uno tiene que hacerse. Y cada rotor es un mundo.
Quizás es más sencillo controlar el rotor sin el mando original.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Gracias Máximo por tu respuesta, son mis primeros pasos con arduino, estaba buscando información sobre el tema de los relés para el G550, pero no encuentro mucha o yo no he buscado lo suficiente. Hoy he estado calibrándolo y leyendo sobre la programación. Poco a poco iré avanzando.
73
Toni Andrés
Hola a todo el foro de nuevo.
Pregunta de novato....ya he puesto en marcha el arduino en azimut con el g1000 de Yaesu y ahora sigo discutiendo con el G550.
La tensión del pot es de 0 a 6'5 voltios, eso ya lo tengo resuelto para bajarlo a 5 voltios máximo.
Al no venir preparado para ser controlado por un interface externo imagino que debo preparar algún tipo de caja de relés, pero no encuentro esquemas. Si alguien puede echar una mano agradecido. Ya tengo localizados los pines en el rj45 de up, down y voltaje.
73 EA5DF
Toni Andrés
Hola,
Quiero exponeros un problema que tengo con el software de K3NG por si alguien puede ayudarme....
Placa Arduino MEGA 2560
Sensor azimutal tipo encoder incremental Omron E6B2
En un principio todo funciona correctamente en la lectura del encoder y visualizo en el LCD la posición en cada momento. El problema viene cuando quiero sincronizar cualquier software de seguimiento, por ejemplo...SatPc32, F1EHN, etc...cuando se sincroniza y manda al Arduino la posición a seguir, automáticamente la posición del LCD se reinicia y empieza nuevamente por 359º, al cabo de x segundos vuelve a perderla y así consecutivamente. Si paro el tracking y el posicionamiento lo hago manualmente el conteo es correcto y no se resetea, solamente es cuando el software manda la posición al arduino. Descarto que sea problemas de rebotes en las señales A B o Z del encoder, pues la lectura es correcta en todo momento, siempre y cuando no mande la posición al arduino. He probado cambiar el encoder por un potenciómetro de precisión y en este caso no ocurre este problema. No sé si tendrá que ver algo las interrupciones de los pines en los cuales tiene que estar conectado el encoder.
¿Alguien ha tenido el mismo problema?
Muchas gracias,
EA3EMG - Sergio
Terrassa - JN11AN
www.qsl.net/ea3emg
ea3emg@amsat.org
QDURE - https://qsl.ure.es
Imprime y confirma tus QSL en tan solo tres click.
Nunca fue tan fácil y cómodo
el confirmar tus contactos.
TIENDA ONLINE URE
Publicaciones, mapas, polos, camisetas, gorras, tazas, forros polares y mucho más...
WEBCLUSTER EA4URE
Conoce el nuevo WebCluster de URE, ahora con nuevos filtros e información y compatible con GDURE