| | 
|
Notificaciones
Limpiar todo
Página 1 / 10
Siguiente

Hola,
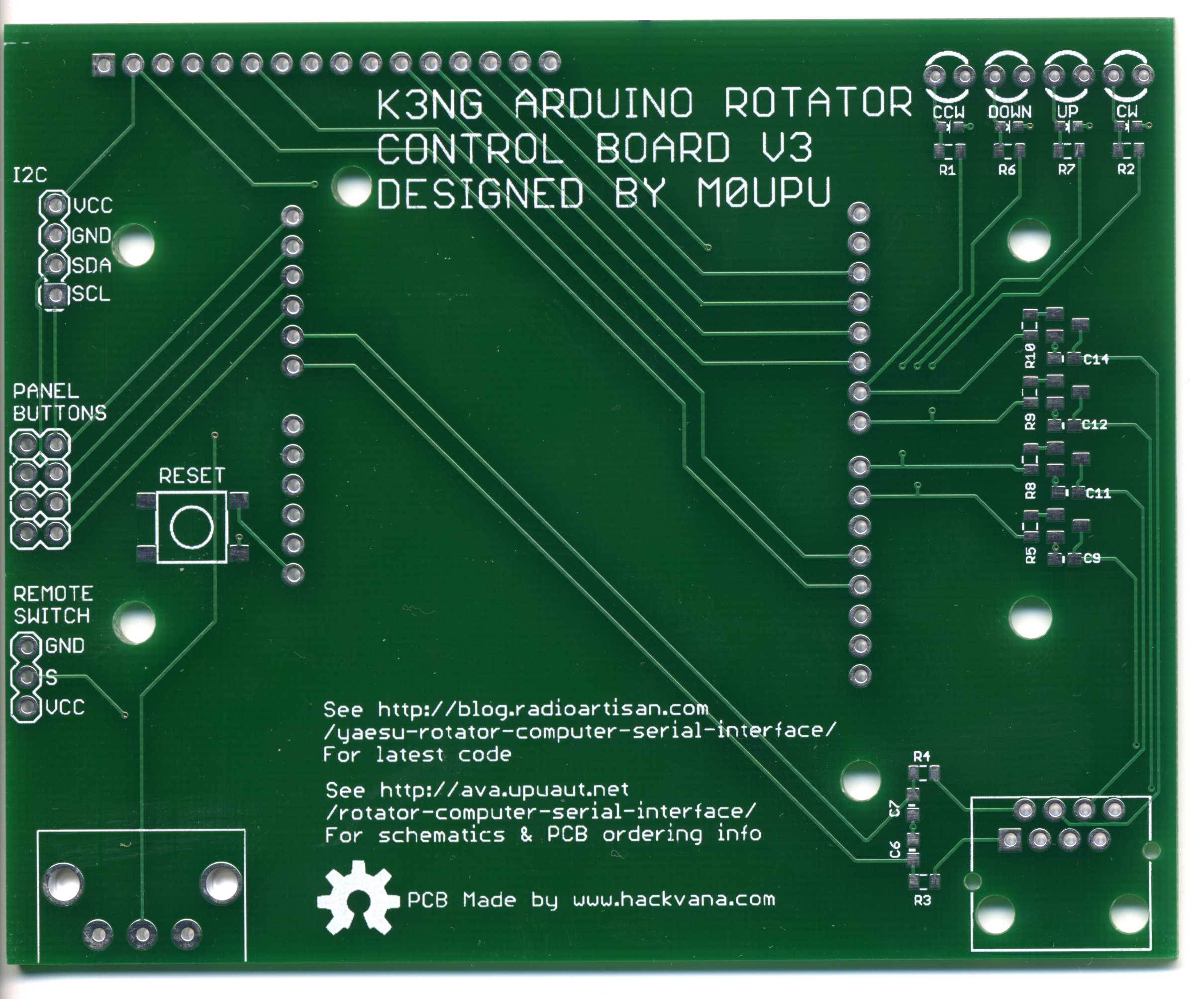
Hace poco descubrí los Arduino y hace como un par de semanas descubrí un proyecto de control de rotores con un Arduino pequeño (Arduino Uno), el K3NG Arduino Rotator Control, de Goody - K3NG.
En principio me pareció un controlador más pero me di cuenta que este era diferente...
La diferencia radicaba en que es sobre Arduino y es de código abierto.
Eso quiere decir que cualquiera puede ampliarlo, modificarlo, integrarlo, etc (por ejemplo; RemoteQTH). Cosa que ninguno de los controladores existentes (que yo conozco) podría.
Por otro lado, para los que hacemos rebote lunar, hay muy pocos controladores de rotores que tengan el seguimiento de la Luna incorporado, solo conozco el DRIACS de OE5JFL y el de F1EHN. Ambos diseños con muchos años encima, cerrados y sin posibilidad de ampliación, integración o modificación.
Entonces pensé que se podría integrar el algoritmo de seguimiento de la Luna dentro del código del Arduino.
Hablé con Goody y me dijo que no tendría problema en incorporarlo si yo le conseguía el algoritmo para Arduino.
Así que me puse con ello.
Nando - I1NDP Consiguió el algoritmo del WSJT, pero estaba en Fortran. Entonces Pete - VE5VA hizo la traducción de Fortran a C y entre él y Nando lo hicieron correr en un Arduino con solo una diferencia máxima de 0.06 grados de diferencia con el WSJT corriendo en un PC.
Entonces le pasamos ese algoritmo a Goody y él lo ha integrado en su tarjeta controladora de rotores.
Todo esto en dos semanas.
Ayer Goody nos comunicó que ya estaba funcionando y listo para probar los demás.
Así que el que esté interesado en un controlador de rotores que además tiene seguimiento automático de la Luna (sin PC), y barato, éste puede interesarle.
Eso si, es Arduino, quiere decir que hay que comprar el Arduino (Mega), bajarse el código, compilarlo y meterselo al Arduino, preparar una placa con relés, fuente, etc. es un proyecto para cacharreadores, [strike]no es algo que vendan listo para enchufar y usar (de momento)[/strike].
Editado; he visto un sitio donde lo venden en kit o incluso montado, listo para usar;
El código se puede bajar de este enlace;
http://sourceforge.net/p/k3ngarduinorota/code/ci/unstable/tree/
Conozco un par de colegas que venden las placas para conectar el Arduino y manejar los rotores;

Un vídeo de una de estas placas sin seguimiento de Luna;
Yo por mi parte voy a pedir un Arduino Mega ya, además de una pantallita, etc. para ponerme en eredar con ello.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Hola Maximo, yo lo tengo marchando con el codigo de K3NG, pero claro usando el PC.
La semana pasada monté el de elevacion, parcialmente, es decir en el cuarto de radio, para probar, ajustar, etc, ya que tambien la parte mecanica es casera, estoy usando un rotor (no actuador) de parabolica de TV modificado y es una pasada va como la seda, ahora quiero terminar un par de cosas en el y subirlo.
Para el seguimiento uso tanto Orbitron como HRD.
73 TNX.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Gracias por la información Máximo.
He decidido completar la instalación de EME para 432, estoy esperando la “materia prima” y en vista de que dispongo de la plaquita del Arduino, será interesante probarlo.
Mi duda es si servirá para controlar el Hy Gain CD-45II en azimuth y el Yaesu G-550 en elevación.
Al ser marcas diferentes ??.
Salud.
Saludos.
Pepe.
URE #13064 EA-QRP #241
http://www.ea6fg.es
Pepe, yo lo tengo con un Kempro KR-400, modificado (pero no por el tema del arduino) y con un G-250 en cuanto a azimut, para elevacion ya lo he comentado.
73.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Enterado, Pedro.
Gracias.
Saludos.
Pepe.
URE #13064 EA-QRP #241
http://www.ea6fg.es
Hola,
Comentar que el código ha sido mejorado añadiendo la capacidad para conectar un módulo GPS y de esa forma actualizar automáticamente la hora, así como las coordenadas del lugar.
También se va a intentar añadir próximamente el seguimiento del Sol para utilizarlo como fuente de ruido y calibrar el sistema.
Como veis es un sistema actualizable y ampliable sin mayor problema.
Yo ya he pedido esta misma mañana una placa Mega, con su pantalla, para empezar a cacharrear.
Os mantendré informados.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Yo también ando liado con el tema. Me he encontrado una pega que no se si alguien la tendrá solucionada. Si utilizamos un actuador para controlar los pulsos, y según leo en la página de M0UPU, deberemos utilizar la entrada digital 2 o la 3 para leerlelos, pero estas ya están en uso por el LCD ¿alguien tiene esta placa funcionando con un actuador y pueda aclararme la duda?
EA5EMM
Julio
Me alegra encontrar este post por aquí...
Yo también ando de pruebas con el código de K3NG en el arduino. Ahora le estoy añadiendo la shield ethernet y tengo una "mini" página para contrar el rotor en remoto via web o desde el movil.
He tenido que suprimir la pantalla porque no sé porque el codigo del LCD me termina colgando el arduino. He probado con un nano y con un mega. Con un LCD I2C y uno normal... y nada si pongo el código del LCD se me cuelga... Aunque la verdad teniendo el mando original mantienes la aguja y también lo ves desde el software que utilices desde el PC
Un saludo!
Ángel
Hola,
Yo estoy un poco retrasado con ello pero espero ponerme al día esta semana.
Escribió:Ahora le estoy añadiendo la shield ethernet y tengo una "mini" página para contrar el rotor en remoto via web o desde el movil.
Ángel, eso me parece interesante.
Este proyecto será con el que aprenda ya que no tenía idea de Arduino. Así que si no te importa, puede que te haga alguna pregunta.
Escribió:¿alguien tiene esta placa funcionando con un actuador y pueda aclararme la duda?
Como acabo de comentar, estoy un poco retrasado con esto y no tengo actuador de impulsos, pero... ha dicho Goody que en la última versión ha añadido un archivo por separado para que cada uno asigne las salidas que quiera, vamos que entiendo que ya no fijas, que se pueden elegir al gusto de cada uno.
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
rotator_pins.h
Escribió:/*
Pin Definitions
You need to look at these and set them appropriately !
Most pins can be disabled by setting them to 0 (zero). If you're not using a pin or function, set it to 0.
Pins > 99 = remote unit pin, for example: pin 109 = pin 9 on remote unit, pin A0+100 = pin A0 on remote unit
*/
/* azimuth pins
(use just the azimuth pins for an azimuth-only rotator) */
#define rotate_cw 0 //113 //6 // goes high to activate rotator R (CW) rotation - pin 1 on Yaesu connector
#define rotate_ccw 7 // goes high to activate rotator L (CCW) rotation - pin 2 on Yaesu connector
#define rotate_cw_pwm 13 //0 // optional - PWM CW output - set to 0 to disable (must be PWM capable pin)
#define rotate_ccw_pwm 113 //0 // optional - PWM CCW output - set to 0 to disable (must be PWM capable pin)
#define rotate_cw_ccw_pwm 0 // optional - PWM on CW and CCW output - set to 0 to disable (must be PWM capable pin)
#define rotate_cw_freq 0 // optional - CW variable frequency output
#define rotate_ccw_freq 0 // optional - CCW variable frequency output
#define button_cw 0 // normally open button to ground for manual CW rotation (schematic pin: A1)
#define button_ccw 0 // normally open button to ground for manual CCW rotation (schematic pin: A2)
#define serial_led 0 // LED blinks when command is received on serial port (set to 0 to disable)
#define rotator_analog_az A0 // reads analog azimuth voltage from rotator - pin 4 on Yaesu connector
#define azimuth_speed_voltage 0 // optional - PWM output for speed control voltage feed into rotator (on continually unlike rotate_cw_pwm and rotate_ccw_pwm)
#define overlap_led 0 // line goes high when azimuth rotator is in overlap (> 360 rotators)
#define brake_az 0 // goes high to disengage azimuth brake (set to 0 to disable)
#define az_speed_pot 0 // connect to wiper of 1K to 10K potentiometer for speed control (set to 0 to disable)
#define az_preset_pot 0 // connect to wiper of 1K to 10K potentiometer for preset control (set to 0 to disable)
#define preset_start_button 0 // connect to momentary switch (ground on button press) for preset start (set to 0 to disable or for preset automatic start)
#define button_stop 0 // connect to momentary switch (ground on button press) for preset stop (set to 0 to disable or for preset automatic start)
#define rotation_indication_pin 0
#define blink_led 0
/*
elevation pins
*/
#ifdef FEATURE_ELEVATION_CONTROL
#define rotate_up 8 // goes high to activate rotator elevation up
#define rotate_down 9 // goes high to activate rotator elevation down
#define rotate_up_or_down 0 // goes high when elevation up or down is activated
#define rotate_up_pwm 0 // optional - PWM UP output - set to 0 to disable (must be PWM capable pin)
#define rotate_down_pwm 0 // optional - PWM DOWN output - set to 0 to disable (must be PWM capable pin)
#define rotate_up_down_pwm 0 // optional - PWM on both UP and DOWN (must be PWM capable pin)
#define rotate_up_freq 0 // optional - UP variable frequency output
#define rotate_down_freq 0 // optional - UP variable frequency output
#define rotator_analog_el 0 //A1 // reads analog elevation voltage from rotator
#define button_up 0 // normally open button to ground for manual up elevation
#define button_down 0 // normally open button to ground for manual down rotation
#define brake_el 0 // goes high to disengage elevation brake (set to 0 to disable)
#define elevation_speed_voltage 0 // optional - PWM output for speed control voltage feed into rotator (on continually unlike rotate_up_pwm and rotate_down_pwm)
#endif //FEATURE_ELEVATION_CONTROL
// rotary encoder pins and options
#ifdef FEATURE_AZ_PRESET_ENCODER
#define az_rotary_preset_pin1 0 // CW Encoder Pin
#define az_rotary_preset_pin2 0 // CCW Encoder Pin
#endif //FEATURE_AZ_PRESET_ENCODER
#ifdef FEATURE_EL_PRESET_ENCODER
#define el_rotary_preset_pin1 0 // UP Encoder Pin
#define el_rotary_preset_pin2 0 // DOWN Encoder Pin
#endif //FEATURE_EL_PRESET_ENCODER
#ifdef FEATURE_AZ_POSITION_ROTARY_ENCODER
#define az_rotary_position_pin1 0 // CW Encoder Pin
#define az_rotary_position_pin2 0 // CCW Encoder Pin
#endif //FEATURE_AZ_POSITION_ROTARY_ENCODER
#ifdef FEATURE_EL_POSITION_ROTARY_ENCODER
#define el_rotary_position_pin1 0 // CW Encoder Pin
#define el_rotary_position_pin2 0 // CCW Encoder Pin
#endif //FEATURE_EL_POSITION_ROTARY_ENCODER
#ifdef FEATURE_AZ_POSITION_PULSE_INPUT
#define az_position_pulse_pin 0 // must be an interrupt capable pin!
#define AZ_POSITION_PULSE_PIN_INTERRUPT 0 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
#endif // read http://arduino.cc/en/Reference/AttachInterrupt for details on hardware and interrupts
#ifdef FEATURE_EL_POSITION_PULSE_INPUT
#define el_position_pulse_pin 1 // must be an interrupt capable pin!
#define EL_POSITION_PULSE_PIN_INTERRUPT 1 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
#endif // read http://arduino.cc/en/Reference/AttachInterrupt for details on hardware and interrupts
#ifdef FEATURE_PARK
#define button_park 0
#endif
//classic 4 bit LCD pins
#define lcd_4_bit_rs_pin 12
#define lcd_4_bit_enable_pin 11
#define lcd_4_bit_d4_pin 5
#define lcd_4_bit_d5_pin 4
#define lcd_4_bit_d6_pin 3
#define lcd_4_bit_d7_pin 2
#ifdef FEATURE_JOYSTICK_CONTROL
#define pin_joystick_x A0
#define pin_joystick_y A1
#endif //FEATURE_JOYSTICK_CONTROL
#ifdef FEATURE_AZ_POSITION_HH12_AS5045_SSI
#define az_hh12_clock_pin 11
#define az_hh12_cs_pin 12
#define az_hh12_data_pin 13
#endif //FEATURE_AZ_POSITION_HH_12
#ifdef FEATURE_EL_POSITION_HH12_AS5045_SSI
#define el_hh12_clock_pin 11
#define el_hh12_cs_pin 12
#define el_hh12_data_pin 13
#endif //FEATURE_EL_POSITION_HH_12
#ifdef FEATURE_PARK
#define park_in_progress_pin 0 // goes high when a park has been initiated and rotation is in progress
#define parked_pin 0 // goes high when in a parked position
#endif //FEATURE_PARK
#define heading_reading_inhibit_pin 0 // input - a high will cause the controller to suspend taking azimuth (and elevation) readings; use when RF interferes with sensors
#ifdef FEATURE_LIMIT_SENSE
#define az_limit_sense_pin 0 // input - low stops azimuthal rotation
#define el_limit_sense_pin 0 // input - low stops elevation rotation
#endif //FEATURE_LIMIT_SENSE
#ifdef FEATURE_AZ_POSITION_INCREMENTAL_ENCODER
#define az_3_phase_encoder_pin_phase_a 2 // must be an interrupt capable pin
#define az_3_phase_encoder_pin_phase_b 3 // must be an interrupt capable pin
#define az_3_phase_encoder_pin_phase_z 4
#define AZ_POSITION_3_PHASE_INCREMENTAL_ENCODER_A_PIN_INTERRUPT 0 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
#define AZ_POSITION_3_PHASE_INCREMENTAL_ENCODER_B_PIN_INTERRUPT 1 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
// read http://arduino.cc/en/Reference/AttachInterrupt for details on hardware and interrupts
#endif //FEATURE_AZ_POSITION_INCREMENTAL_ENCODER
#ifdef FEATURE_EL_POSITION_INCREMENTAL_ENCODER
#define el_3_phase_encoder_pin_phase_a 2 // must be an interrupt capable pin
#define el_3_phase_encoder_pin_phase_b 3 // must be an interrupt capable pin
#define el_3_phase_encoder_pin_phase_z 4
#define EL_POSITION_3_PHASE_INCREMENTAL_ENCODER_A_PIN_INTERRUPT 0 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
#define EL_POSITION_3_PHASE_INCREMENTAL_ENCODER_B_PIN_INTERRUPT 1 // Uno: pin 2 = interrupt 0, pin 3 = interrupt 1
// read http://arduino.cc/en/Reference/AttachInterrupt for details on hardware and interrupts
#endif //FEATURE_EL_POSITION_INCREMENTAL_ENCODER
#ifdef FEATURE_YOURDUINO_I2C_LCD
#define En_pin 2
#define Rw_pin 1
#define Rs_pin 0
#define D4_pin 4
#define D5_pin 5
#define D6_pin 6
#define D7_pin 7
#endif //FEATURE_YOURDUINO_I2C_LCD
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Hola Angel y Máximo.
A mi me llega mañana el Arduino, como el miercoles es festivo en Valencia ciudad subiré al Chalet (es donde esta la emisora) y me bajaré un actuador pequeño que tengo allí para probar la parte de elevación con el código nuevo. Lo había visto Máximo pero como aun está en desarrollo me he centrado más en el estable y de ahí el despsite.
Otra cosa, no se si me he despistado o que, pero ¿para que los relés? los transistores que controlan el movimiento derivan a masa cuando les toca actuar y de esa manera debería funcionar el rotor. de hecho en el software viene la forma de conectar los rotores Yaesu directamente sin utilizar relés. La utilidad que le veo a la placa de relés es protreger los transistores pero aun así pienso que no hace falta ¿alguién a tenido una mala experiencia con esto?
Saludos y continuaré cacharreando.
EA5EMM
Julio
Los reles actúan simulando que pulsas el contacto manual del rotor. No se si se podría hacer con transistores, lo mio es más la programación que la electrónica análoga, pero a mi me gusta que se oiga así se que cuando hago doble click en el HRD el rotor esta haciendo lo que debe.
También quiero añadirle el.poder conectar y desconectar cosas en remoto. Para la banda de 60mts por ejemplo utilizo un relé que puentea la bobina de 80 de una butternut.
Un saludo
Enviado desde mi SM-N9005
Ángel
Ángel, ¿Como has hecho esa página web?
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
EA1DDO (desde el movil no veo tu nombre) hace falta el mega y la shield ethernet. Esta hecho con HTML5 y ajax. Via ajax manda los comandos al arduino y cada segundo y medio va actualizando la posición del rotor. Si estas interesado en ello te lo puedo enviar. Hay dos shields principalmente para ethernet y una de ellas no vale porque se queda muy corta, te confirmo cual es la buena que ahora no recuerdo.
Todo el código esta en un include pero hay que tocar también el include principal de k3ng.
Un saludo
Enviado desde mi SM-N9005
Ángel
Una pregunta ¿alguien le ha comprado recientemente la placa a M0UPU? ¿Tardó mucho en llegar?
Gracias.
EA5EMM
Julio
La placa tarda una semana o dos , en mi caso tardo 9 dias son muy serios y la placa es gran calidad 73.. Jose Ignacio
Hola,
Escribió:Si estas interesado en ello te lo puedo enviar.
Ángel, si, por favor ea1ddo@hotmail.com
Yo no tengo mucha idea de programación pero quiero aprender algo más, por eso te lo pido, para ver como está hecho y no tener que empezar de cero.
Lo de la shield de Ethernet, yo aún no la he pedido. Pensaba que eran todas iguales, creo recordar que usan W5100 o algo así. Pero si hay unas mejor que otras... soy todo oídos.
En el futuro mi idea es poder tener todos los cacharros IP y controlarlos desde web, por eso te agradezco esos archivos de ejemplo.
Hablamos
Muchas gracias
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Hola Máximo,
ya te lo he enviado... Respecto a la shield esa es la buena, hay otra que es mas barata pero no va bien y es mucho menos potente..... Con la W5100 es con la que estoy yo trabajando también.
Lo que no he logrado es poder dejar el display, el arduino se me cuelga... No se si a alguien le habrá pasado o no
Un saludo!
Ángel
Hola, el tema de los reles se debe a que en la mayoria de rotores el motor trabaja en AC, ademas se intoduce un aislamiento entre control y potencia y de un modo muy simple.
Respecto al control por ethernet, yo lo que quiero es saber como actuar y configurar el HRD, que creo que se puede hacer tener un acceso remoto.
73.
Mi hijo me hace profundamente feliz
TNX & 73,
Pedro EA4ADJ IM88jw http://ea4adj.jimdo.com/
La solana. Que pueblo, galan!
Hola,
Cuando hace unos días dije que iba "algo retrasado" con este tema del Arduino...
Llevaba como dos semanas tratando de empezar.
La primera placa, Arduino Mega original, se me quemó. La tuve que mandar de vuelta.
La segunda placa, me envían una Funduino Mega, y me pasé como una semana tratando de hacerla funcionar. No funcionaba por culpa del PC. No reconocía el USB.
Yo tenía un Windows7 de esos "aligerados". Tan aligerado que no tenía todo lo necesario para reconocer el USB del Arduino, y mira que eché como una semana indagando con los drivers...
Finalmente, ayer tuve que re-instalar el Win7 con una versión completa.
A las doce de la noche el Win7 nuevo por fin reconocía el Arduino.
Esta tarde empecé con él...
Otras dos horas para hacer que la pantalla funcionara. Es I2C y yo conectaba como decían A4 y A5. Pues no, después de dos horas encontré que la Mega no es en A4 y A5 si no en D20 y D21...
Y así todas. Principiante.
Luego las librerías de la pantalla. cada fabricante tiene su librería y hay que importarla al IDE. Yo no sabía nada de eso.
Luego problemas al compilar, de programación.
Hasta que ya cogí algo de velocidad y he ido aprendiendo detalles y he modificado el código original de K3NG y lo he hecho funcionar con mi pantalla 2004 y hasta le incrusté el código de seguimiento de la Luna, todo así en plan pruebas.
Pero para ser la primera tarde, la cosa me gusta.
Aquí os dejo un pequeño vídeo del final del primer día;
73, Máximo - EA1DDO
Máximo Martín - EA1DDO / HK1H / M0HAO
EA1DDO@HoTMaiL.com
http://www.EA1DDO.es
Inició el tema
Página 1 / 10
Siguiente
QDURE - https://qsl.ure.es
Imprime y confirma tus QSL en tan solo tres click.
Nunca fue tan fácil y cómodo
el confirmar tus contactos.
TIENDA ONLINE URE
Publicaciones, mapas, polos, camisetas, gorras, tazas, forros polares y mucho más...
WEBCLUSTER EA4URE
Conoce el nuevo WebCluster de URE, ahora con nuevos filtros e información y compatible con GDURE